
У SPH Engineering есть парк разнообразных малых дронов, благодаря которым можно осуществлять исследования и разработку. Это позволяет команде поддержки UgCS советоваться с пользователями с целью выбора наиболее подходящих комбинаций оборудования для аэрофотосъемки.
Когда для наземной съемки, картографирования и 3D-реконструкции применяются дроны, точность траектории полета очень важна. У каждого дрона свой уровень точности полета по заранее заданным маршрутам.
Мы решили испытать большинство дронов, поддерживающих UgCS, чтобы показать отличия в точности различных автопилотов. С помощью дронов и программного обеспечения UgCS выполним небольшой фотограмметрический полет (рис. 1). Это простой, но показательный маршрут, чтобы провести фотограмметрию с выходом за пределы области, позволяющий сравнить различные режимы прохождения поворотов и лучше видеть, насколько точно беспилотник следует по траектории.
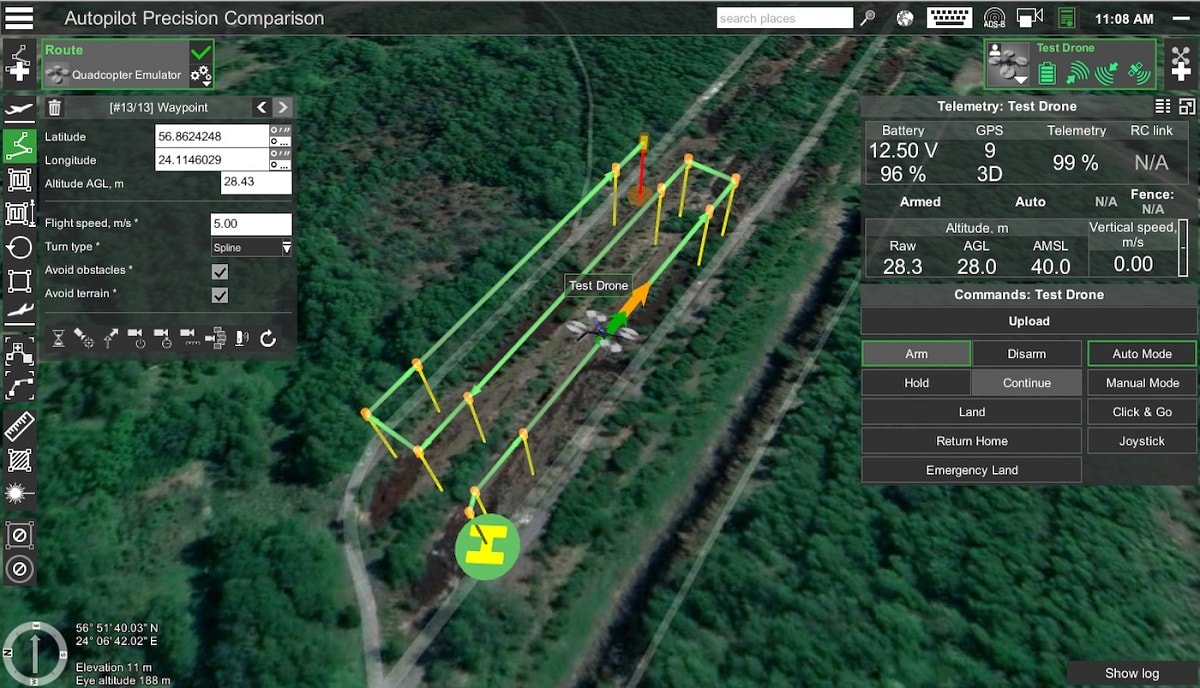
Испытательный маршрут с выходом за пределы области
Траектория полета будет записана и показана в Google Earth. Условия полета одинаковы для всех беспилотников: скорость ветра около 2-3 м/с.
DJI Phantom 4
Это один из современнейших беспилотников, который набрал популярность и даже стал применяться в профессиональной фотограмметрии. DJI Phantom 4 дважды выполнил полет, сравнивая точность следования траектории в различных режимах поворота: первый полет в режиме «остановка и поворот», второй — в режиме «адаптивный поворот с креном».
Yuneec H520
Yuneec H520 прошел испытательный маршрут для проведения фотограмметрии с программным обеспечением UgCS без отклонений. Yunueec H520 точно придерживался линии полета, и даже при прохождении поворотов дрону удалось держать траекторию. Также высота, на которой работает беспилотник, идеально подходит для запланированного маршрута.
DJI M600
M600 совершил полет с небольшими отклонениями от траектории при прохождении углов, что можно объяснить большей массой аппарата по сравнению с другими беспилотниками. Также высота, на которой летает M600, отлично подходит для проведения фотограмметрии по запланированному маршруту.
DJI Inspire 1
Наряду с остальными дронами DJI, Inspire 1 также прошел по испытательному маршруту в двух различных режимах поворота: первый полет в режиме «остановка и поворот», второй — в режиме «адаптивный поворот с креном».
DJI Naza-M V2
Naza-M V2 — это популярный автопилот от DJI, который используется как любителями, так и профессионалами. В нашем случае он был установлен на DJI F450. Он прошел тот же маршрут, что и DJI Phantom 4, в трех разных режимах поворотов: «остановка и поворот», «поворот с креном» и «адаптивный поворот с креном».
Как и ожидалось, − поскольку DJI Naza-M V2 уже немного устарел, − траектория была не так же точна, как при полете Phantom 4. Режим поворотов Adaptive Bank показал лучшие результаты по мере траектории движения.
MikroKopter Quad XL
MikroKopter — это зарекомендовавшая себя компания из Германии, которая уже долгое время производит дроны. Беспилотники MikroKopter популярны в Германии, а также многих других странах Европы и мира.
На видео MikroKopter Quad XL, летящий по тому же маршруту, созданному в UgCS, по которому летали другие дроны:
DJI A2
A2 установлен на платформе DJI S900. Каждый из трех полетов выполнялся в разном режиме поворотов — «остановка и поворот», «поворот с креном» и «адаптивный поворот с креном». Результаты:
3DR Iris с прошивкой PX4
Траектория полета непрерывна, непредвиденных отклонений не наблюдалось. Дрон отклонился от линии маршрута только при повороте, но, поскольку допускается выход за пределы области линий наблюдения, это не может повлиять на общую картину, полученную при фотограмметрии.
3DR Iris Pixhawk с прошивкой ArduCopter
В десятом эпизоде нашей серии видеороликов, сравнивающих точность различных автопилотов, показано испытание Pixhawk с прошивкой ArduCopter 3.4.6. Траектория полета непрерывна и точна! Смотрите подробнее на видео:
DJI Phantom 3
DJI Phantom 3 дважды выполнил полет, сравнивая точность следования траектории в различных режимах поворотов: первый полет в режиме «остановка и поворот», второй — в режиме «адаптивный поворот с креном». Траектория полета Phantom 3 практически не отклоняется от ожидаемой, небольшие отклонения только на поворотах. Смотрите сравнение на видео:
Lockheed Martin Indago
Траектория полета Lockheed Martin Indago очень плавная и точная — именно то, что нужно. Для испытательного полета автоматические настройки Indago оставались без изменений, поэтому он постепенно набирал нужную для полета высоту. Это необходимо учитывать при планировании фотограмметрических работ с помощью Indago: до того, как выставлять автоматический режим полета, необходимо подобрать требуемую высоту вручную. Смотрите подробнее на видео:
Microdrone MD4-200
Microdrone MD4-200 взлетел выше, чем требовалось для прохождения маршрута. Разница в высоте произошла из-за того, что автоматический режим был включен после того, как дрон уже находился в воздухе. Смотрите подробнее на видео:
